阪神高速では、1992年に「突発事象検出システム」を導入するなど、早くからAHS(走行支援道路システム)による交通安全対策に取り組んでいます。
本システムによって検出された交通事故映像は、全国ネットのテレビ番組に「衝撃の事故映像」として何度も取り上げられ放映されました。
この「突発事象検出システム」とは、見通しの悪い急カーブや合流部、トンネル区間などに設置した複数台のカメラからの映像を画像処理することにより、事故や故障、渋滞などで停止した車両を自動的に検知するシステムです。
見通しの悪い曲線での事故は、後続車を巻き込んだ2次的な事故を引き起こす恐れがあります。このため、事故や故障により自動車が停止するような事象が発生した場合には、CCDカメラで事象を瞬時に検知し、その区間の上流に設置された表示板に、後続車へ注意を促す警告が自動表示される仕組みとなっています。
交通管制センターでは、発報のあったカメラ映像を確認したうえで、状況により警報表示板の表示内容をより正確な情報に書き換えると共に、必要な事故処理対策作業を手配します。
システム導入後の調査で、警報表示の内容によって、後続車両ドライバーは速度低下、利用車線変更などの、安全運転行動をとることが確認されました。またこれまで交通管制センターでの事故などの異常事象の認知には、平均8分以上の時間を要していましたが、本システム設置区間では、2秒以内の認知と、確認後の迅速な事故対応が可能となりました。
本システムには世界ではじめて、交通流映像から車両を抽出検知し、軌跡を追跡することで走行速度を算出し、2秒以内に停止を判定する、画像処理技術が実用化されています。また、その後の日本のITS(安全運転支援システム開発)の先駆けとして、位置付けられることとなりました。
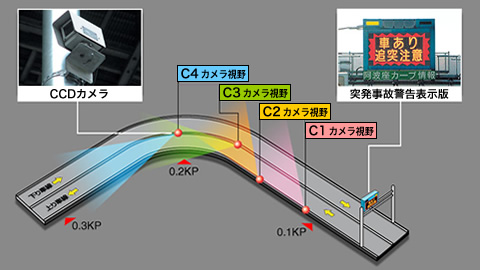
1991年末、当時事故多発NO.1であった3号神戸線阿波座カーブ上り区間に、設置された本システム第1号プロトタイプモデルの概念図です。カーブ部手前C1からカーブ後C4まで、4台のCCDカメラが照明ポールに設置され、約200mの路面監視エリアをカバーしています。C1の上流約400mに警告表示板が設置され、後続車両に前方カーブ区間内で発生した突発事象を表示することができます。路下の通信塔に各カメラからの映像を処理する画像処理装置が配備されています。
突発事象検出システムに採用した画像処理装置内には、1カメラあたり64MbitのD-RAMが搭載されていて、128フレームの画像(H256画素*V256画素*8bit階調)を蓄積できます。停止車両を検出すると画像データの上書きを停止し、検出時点以前の画像128フレームを再生(10コマ/秒~5コマ/秒の可変準動画)でき、停止に至るメカニズムを観察することができます。
以下は阿波座カーブのシステムが検知し、蓄積した事故時のコマ落とし画像です。

カーブに侵入したトラック後輪遠心力で
右側へスタッド

体制を立て直そうと
右へとっさに逆ハンドル操作

右側高欄へ直進、激突、停止

横向き停止(2車線閉塞)検出したトラック、後続車両が急接近、急ブレーキ
担当者からひと言 橋本さん・塩見さん
1989年春、水資源関係者から、堰に設置する魚道の有効性を証明する方法はないかと相談されました。「魚道内を水中カメラで監視し、画像を処理することで通過する魚種や匹数を認識したらどうか。」と話しているうちに、水中の三次元画像処理よりも路面の車両認識のほうが容易ではないか(2次元に近い)と考え、道路交通画像処理技術の開発に着手することにしました。
停止車両検出のアルゴリズム開発に2年、プロトタイプモデル構築に1年、足掛け3年をようして、1992年阿波座カーブ上り区間に第1号システムが稼動することとなったのです。
日照状況による構造物や車の影、雨天時の路面反射、路面に落ちたゴミなど誤認識の原因を排除し、画像データのロバスト性を向上するのに苦労しました。当時は画像処理装置に搭載したCPUやICチップ、CCDカメラがまだまだ高価で、能力も低かったので、単眼カメラによる2次元画像の処理を採用したからです。高さ情報を加えた3D画像情報処理が行えれば、雑影対策はもっと違うものになったことでしょう。