
淀川左岸線の大開坑口付近は本線がカーブで、なおかつ本線と入路はトンネル函体で隔てられているため、本線から入路を視認することができない構造となっています。そのため、入路から低速車が合流する際、本線側の車両は車線変更やブレーキ操作などの回避行動を取ることが非常に困難です。そこで、入路から合流する車両を早期に認知し、余裕を持って入路からの進入車両を回避することを可能とするため、入路側の車両の存在を本線側の車両に知らせる合流支援システムを導入しました。
図-1 合流支援システムの構成
合流支援システムは、入路側の車両を検知するセンサ及び本線側の車両に対して合流車両の存在を知らせる表示板で構成しています。図-1に合流支援システムの構成を示します。
合流支援システムのセンサの機能としては、雨、霧など天候の影響を受けずに安定した車両検知が可能なことや、車線規制を伴う保守作業が困難なトンネル構造の1車線のランプに設置されるため、監査路上で保守可能なことが求められました。そこで、これらの要件を満たすセンサとしてランプの誤進入・逆走対策で検討した、遠赤外線カメラによる画像処理方式を採用しました。
車両検知の手段としては、超音波ヘッドやループコイルなどのセンサを用いることが一般的ですが、これらのセンサは供用後に車両の検知位置を変える場合、センサ自体を移設する必要がありますが、画像処理方式はセンサの移設を伴わずに車両の検知位置の調整が可能です。また、画像処理方式は原理的には車両速度の計測もできることから、供用後の交通状況に応じて、入路側の車両が高速の場合は、表示板を早めに点灯させるとともに、表示させる項目を変えるなど、表示板の表示タイミングや表示内容を更新することも可能です。
センサと表示板はそれぞれ2台、センサによる車両の検知位置と表示板の位置がトンネルの壁を隔てて、だいたい同じ位置になるように設置しました。このことにより、入路から合流する車両が存在する場合に、本線を走行する車両から入路側の車両が見えなくても、入路側の車両のおおよその位置がわかり、本線を走行する車両が直感的に回避行動を取ることが可能となります。写真-1にトンネル本線の表示板を示します。
(※)交通安全施設において、画像処理技術のうち移動体を追尾する技術は東京大学上條研究室で開発された時空間MRF(Markov Random Field)を活用しています。

写真-1 トンネル本線の表示板
淀川左岸線の島屋側坑口付近は設計速度が80kmの湾岸線から分岐してすぐに下りの急勾配となり、その後トンネル内で曲率半径150mのカーブが連続する構造となっています。
車両の速度が上昇していることに気づかないままトンネル内の急カーブに突入すると非常に危険なため、トンネル坑口付近で速度を超過して走行する車両に対し、速度超過を警告し、減速を促す速度超過車両警告システムを導入しました。
速度超過車両警告システムは、車両の速度を計測するセンサと速度を超過した車両に対して警告表示を行う表示板で構成しています。図-2に速度超過車両警告システムの構成を示します。
車両の速度を計測するセンサの種類は、ループコイル方式やレーダー方式、超音波方式などが一般的ですが、ループコイル方式はセンサを舗装内に埋設する必要があるため、保守性に劣るという問題があります。また、レーダー方式は無線局免許が必要であることや他の方式と比べて非常に高価であるという問題があり、超音波方式は車両の速度が上がるにつれて計測される速度の誤差が大きくなるという問題があります。
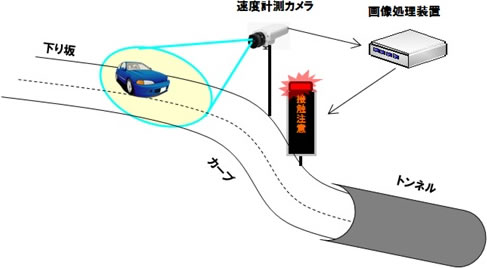
図-2 速度超過車両警告システムの構成
そこで、速度超過車両警告システムのセンサの種類としては、ランプの誤進入・逆走対策で検討した、遠赤外線カメラによる画像処理方式を採用しました。
遠赤外線カメラは雨、霧など天候の影響を受けずに安定した車両検知が可能なだけでなく、センサ本体は速度計測範囲から離れた別の場所、例えば表示板と同じ門型の標識柱などに設置することが可能であるため、供用後の保守も容易です。
センサが速度超過車両を検出すると、写真-2に示す表示板に減速を促す内容を警告表示します。表示を見て速度超過に気づいた運転者がブレーキ操作等を行い、トンネルへ進入する前に車両の速度を落とすことにより、トンネル内の急カーブを安全に通過することができます。
(※)交通安全施設において、画像処理技術のうち移動体を追尾する技術は東京大学上條研究室で開発された時空間MRF(Markov Random Field)を活用しています。
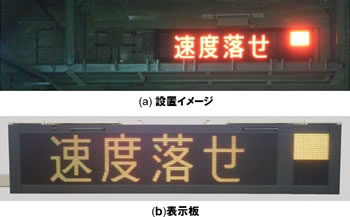
写真-2 表示板
淀川左岸線のトンネルの途中に設けられた正蓮寺川ランプと大開ランプは一般的な阪神高速道路のランプとは異なり、一般道路から下っていく構造となっています。
また、一般道路との接続部には交差点があり、ランプの出入口が近接しているため、歩行者や自転車によるランプへの誤進入や乗用車等が出路から逆走して進入する可能性があります。さらに、ひとたび高速道路本線に歩行者や自転車、逆走車が進入すると、トンネルという閉鎖空間のため、大惨事に発展するかもしれないという懸念がありました。
そこで、歩行者や自転車の誤進入防止対策と出路から乗用車等の逆走車防止対策について検討を行い、関係機関と協議の結果、各出路と一般道路が接続する付近に逆走防止システムを設置することとしました。
逆走防止システムは、歩行者や自転車、逆走車を検知するセンサ、並びにこれらの誤進入者(車)に対して警告を行う表示板と拡声装置で構成しています。図-3に逆走防止システムの構成を示します。
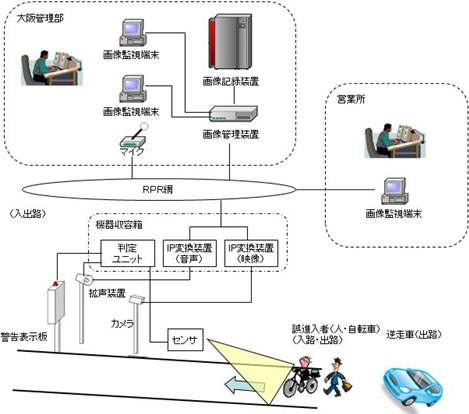
図-3 逆走防止システムの構成
逆走防止システムのセンサの機能としては、歩行者や自転車、逆走車など、大きさや動きが異なる検知対象を漏れなく検知する必要がありますが、一方で漏れなく検知しようとして、正常な状態にまで頻繁に異常と検知(誤検知)してしまうと、交通指令台での業務に支障をきたすため、誤検出を可能な限り抑制することが求められました。
そこで、歩行者や自転車、逆走車を検知するための各種センサ(検知手段と検知方法)について仕様比較を行い、写真-3に示す遠赤外線カメラを使った画像処理方式を採用しました。一般的に画像処理方式は対象物の大きさや位置をいわゆる"視覚的"に検知することが可能ですが、特に遠赤外線カメラは直射日光による影や雨、霧など天候の影響を受けにくく、また夜間暗い場所でも対象物の検知が可能なため、今回のような屋外環境下で大きさや動きが異なる対象物を検知するのに最適であると判断しました。また、透過型車両検知器などの一般的なセンサは検知範囲付近に設置しなければならないのに対し、遠赤外線カメラは表示板と同じ場所に設置することが可能であるため、供用後の保守も容易であるという特徴もあります。

写真-3 拡声装置と遠赤外線カメラ
当社にとって道路上の対象物を検知する方法として、遠赤外線カメラを採用するのは初めてであったため、実際に今回採用したものと同じ仕様の遠赤外線カメラを工事現場に設置して、歩行者や自転車、乗用車を昼夜間問わず安定して検知できることを確認しました。
センサで歩行者や自転車、逆走車を検知すると、現地に設置された写真-4に示す表示板と写真-3に示す拡声装置で事前に登録された表示内容と固定メッセージにより自動的に警告を行うとともに、交通管制室にも警報があがり、写真-5に示す交通指令台に設置している監視卓のモニタにより、遠赤外線カメラの映像で現地の状況を確認できるシステムとなっています。また、状況に応じて表示内容と固定メッセージを交通管制室から手動で変更することも可能です。
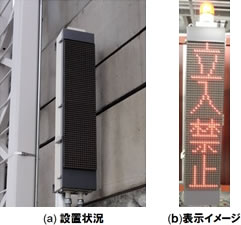
写真-4 表示板
一方、入路についても出路と同様に歩行者や自転車の誤進入を防止する対策として、歩行者と自転車のみを検知対象とし、逆走検知機能を持たないシステムを不法侵入防止システムとして導入しました。
不法侵入防止システムと逆走防止システムは逆走検知機能の有無が異なるだけで、基本的には全く同一のシステムです。これら二つのシステムを同じシステムとすることで、補修部材の共通化による保守作業の省力化や交通指令台での業務の一元的な運用を実現しています。
(※)交通安全施設において、画像処理技術のうち移動体を追尾する技術は東京大学上條研究室で開発された時空間MRF(Markov Random Field)を活用しています。

写真-5 監視卓のモニタ

